Marcus Lim
Systems Engineering Project
What:
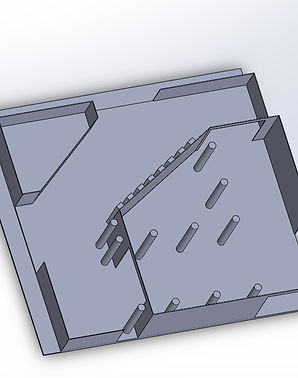
To design an arena that strategically hinders competitors robots while ensuring our AgileX Limo robot can navigate through obstacles set with similar intensity.
How:
- Applying systems approach to ensure seamless integration between mechanical design, electronics and robotic software (ROS)
- Introducing obstacles that challenges the limits of the robot's LIDAR sensors
- Implementing confusing electronics that could potentially delay our opponents
- Optimizing obstacle inflation radius in sensors to ensure the robot is able to identify obstacles while still pass through tight gaps
Key Takeaways:
- Gained an understanding of designing and integrating a system
- Synthesizing, analyzing and selecting the best alternative
- Project management and team collaboration across disciplines
- Proficient understanding in using LiDAR sensors and depth cameras to ideate obstacles and develop efficient navigation strategies
Autonomous Mobile Robot
What:
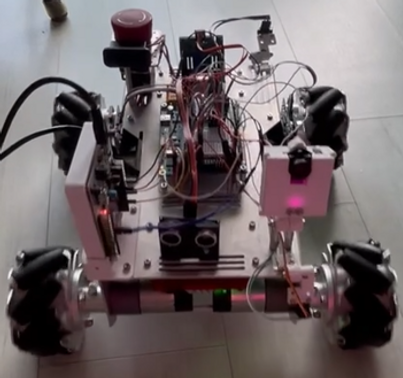
To assemble and code an autonomous mobile robot capable of following movement.
How:
- Assembled robot with provided components along with Parallex P1 microcontroller
- Implemented motor control with Mecanum wheels
- Pixy2 camera for visual capabilities
- Additional safety features with ToF and Ultrasonic sensors and an emergency stop button
Key Takeaways:
- Integration of robot, ensuring all parts work together seamlessly with Parallex P1 microcontroller
- Leveraged the multi-core processing capabilities of the Parallex P1 microcontroller
- Understanding operational safety in mobile robotics
Robotic Payload
What:
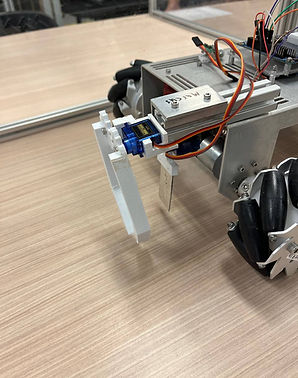
Designing, manufacturing and assembly of mobile payload onto Autonomous robot.
How:
- Designed a grabber and kicker on Solidworks
- Fabricated the parts using aluminum and 3D printing
- Leverages off two servo motors controlled by a XBee
Key Takeaways:
- Payload integration onto mobile robot, taking into account of the new weight shift
- Critical thinking skills capable of efficient designing